Objective:
- Drive the robotic vehicle back and forth with variable speed.
- Turn the vehicle left and right.
- Use the ping sensor to protect the vehicle from the obstacle.
- Design the front panel as shown in the fig.

Apparatus Required:
Procedure:
- Connect one end of the Ethernet cable to the pc and other end to the vehicle ethernet port.
- Follow the screen shots sequentially to configure and build LabVIEW code.










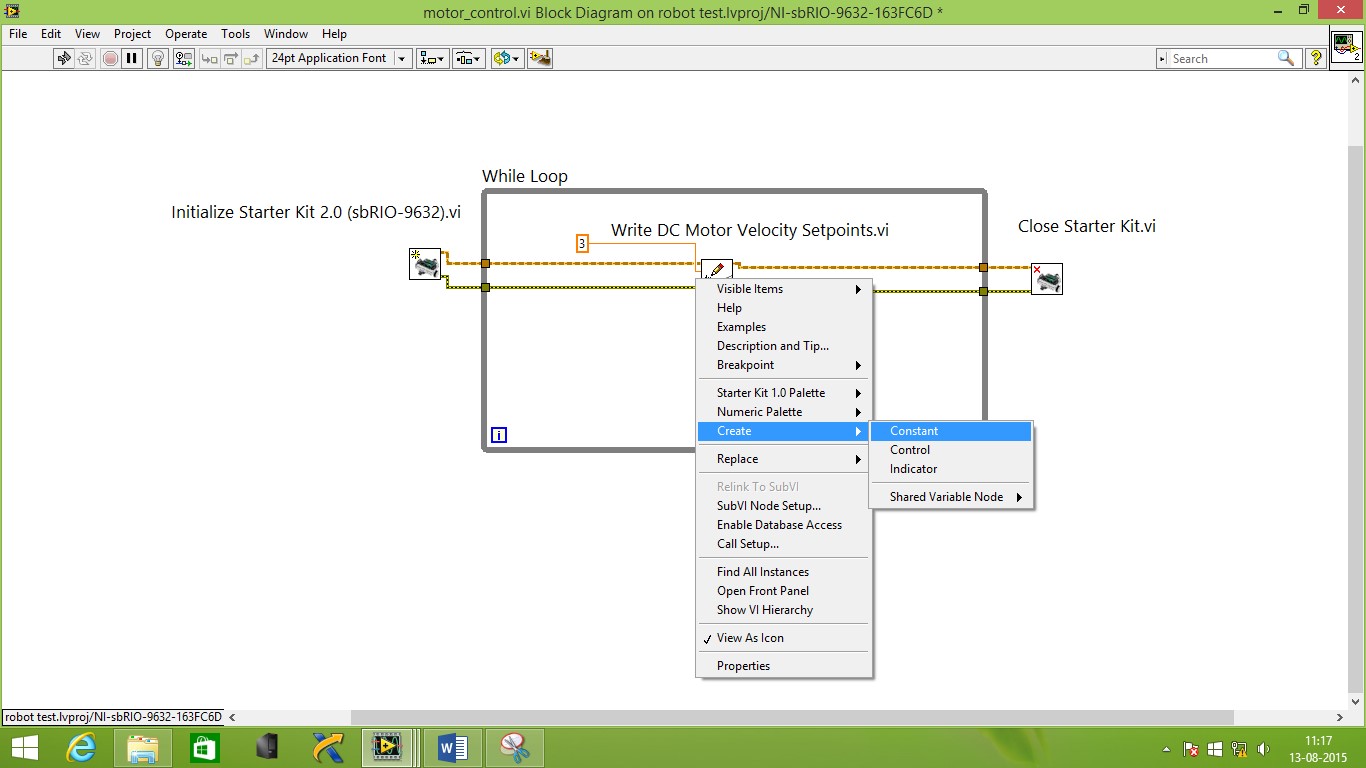

Right click on Build Specification and choose New>Application.






Now run the VI from the front panel or block diagram and control the robot via front panel UI.
No comments:
Post a Comment